I have been working some more on the drone project, and have started to make some decisions. I have decided to use C, as in recent months I have gained confidence with the dialect (though the lack of malloc is certainly interesting). I have also started on the 3D CAD modelling. I will use an Arduino Nano (with Sketch). Speaking of Arduino Nanos, I also participated in a robotics competition with my robot in the last couple of days. I got a completed run on full-width line follow, completed and 3rd place with half-size, as well as completed and 3rd on drag race. However, my robot shorted at the critical time of 2 minutes before the wall following competition, meaning an alternative robot was tried, but with less developed (ie no calibration) code for wall following, the last minute substistute didn't work. But I am confident a run could have been secured, and hope to enter more runs in future! Also, I will try to post on here more regularly!
Today I have been working more on my OS. I decided that is was time for some better practices and thus I decided it was time to ditch the while loop that waited about 5 seconds (varies), and use the RTC! So I did. The RTC is a most useful chip and with it I can glean many values. With the time in hand, it was pretty easy to write a timer (though integer values only). Below I attach an image of the timecommand within my OS.
 As always, you can find out more here.
As always, you can find out more here.
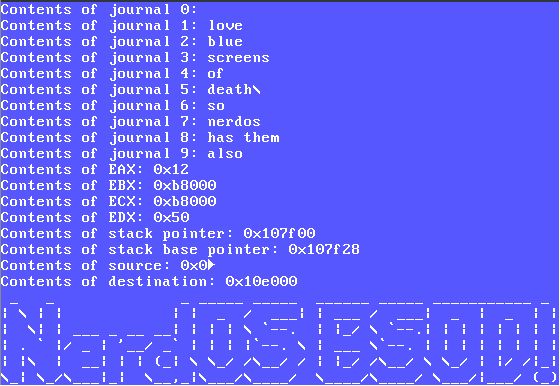
I bring news of my OS! NerdOS, a 32-bit x86 operating system is coming along, and today I introduced the following screen that we all know and love: the BSOD! One of my personal favourite Windows features, the BSOD used to be a wealth of debugging data, until Win10 when Microsoft nerfed it. In the BSOD of NerdOS, as shown below, it dumps the journals and the registers. You can find out more at the GitHub page here.
In the last week or so, I have been working on building a drone! The first things I have been doing is designing a rough outline in Fusion 360 (I had to use Windows for this). I have been tossing up between an Arduino Nano and a RPi Pico for the controller, and which battery I am going to use. I will probably end up writing it in C, though perhaps Python.